
熱線電話
187-1797-6220

混合式步進電機由定子和轉子組成。固定鐵芯等效于無功步進電動機,在每個極上都有小齒和控制繞組。轉子的結構與水久磁鐵的電磁減速同步電動機相同。以兩相混合式步進電動機為例,其結構原理如圖1所示。
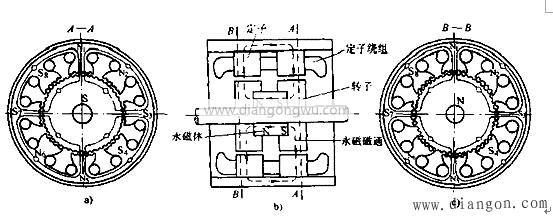
a)S極轉子的徑向剖視圖b)軸向視圖c)N極轉子的徑向剖視圖
轉子是對稱的兩級電磁鋼。軸向充電后,一個部分為N極,另一部分為S極。與轉子相對應的定子也分為兩部分,但實際上被視為一個部分。兩個定子鐵芯配備有相同的兩相對稱控制繞組,如圖1b所示。
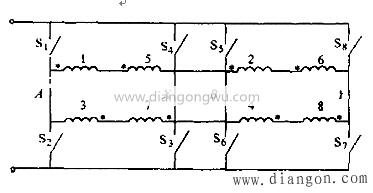
小齒均勻分布在轉子中,8極均勻分布在定子中。每個刺激也有小牙齒。齒的寬度和節距與轉子完全相同。兩個定子磁極面向方向。必須嚴格對齊,并且不允許未對齊。兩個轉子的軸向中心線以齒距的一半錯開,定子中的八個磁極中的每個磁極都配有一個線圈,每個線圈都穿過兩個定子。八個線圈以特定方式連接,如圖2所示。在此,圖中的“ *”表示同名的末端連接。 1-3-5-7極的繞組形成A相控制繞組,而2-4-6-8極的繞組形成B相控制繞組。當開關S1和S3閉合時,定子中極1-3-5-7的極性為N-S-N-S,稱為A相正電流。當S2和S4關閉時,
處于4個線圈中中的電流反向,刺激1-3-5-7的極性為S-N-S-N,稱為A相陰極電流。當相繞組的開關S5和S7閉合時,2-4-6-8極的極性也為N-S-N-S,稱為B相正電流。當S6和S8閉合時,極性也變為S-X-S-N,稱為B相陰極電流,如圖1a)和c)所示。
當在A相上施加正電源時,轉子位置為平衡位置。此時,定子磁極1和5的齒與端A的轉子齒和端B的轉子槽對齊。磁極3和7的齒與B端的轉子齒對齊。 A級,B相4極(2、4、6、8)和轉子的齒全部錯開1/4節距。轉子的兩端具有相反的極性,但它們錯開了一半,因此齒距是相同的,因此當轉子不在平衡位置時,作用在兩端的轉矩方向是相同的。在同一端,定子的極和第三極具有相反的極性,而轉子的同一端具有相同的極性,但是它們錯開了定子極和第三極的相對位置間距的一半。轉子的齒很小,因此所施加的轉矩的方向也相同。
如果按照A正→B正→A負→B負→A正的順序將直流脈沖施加到電動機定子的相繞組,則由于齒結構交錯,電動機和轉子被迫為1。上面提到的線圈連接方法,有可能。/4螺距的螺距角在特定方向上執行。
公司地址 : 上海市嘉定區寶安公路2999弄
公司郵箱 : 187-1797-6220@163.com
公司電話 :?021-6992-5088
