
熱線電話
187-1797-6220

伺服電機(jī)驅(qū)動電路流程圖
1.使用STK6217芯片的伺服電機(jī)驅(qū)動電路的結(jié)構(gòu)
圖1顯示了使用STK6217芯片的伺服電機(jī)驅(qū)動電路的結(jié)構(gòu)。電動機(jī)采用直流電動機(jī),可實現(xiàn)大范圍的恒速控制。速度信號發(fā)生器(FG)設(shè)置在電動機(jī)上,以檢測電動機(jī)的轉(zhuǎn)速。該系統(tǒng)需要兩種電源。一個是電動機(jī)繞組的電源(+ 24V),高電源電壓可以達(dá)到52V,另一個是+ 5V,為小信號處理電路提供電壓。芯片。
該電路的同步頻率為2000Hz,參考晶體振蕩信號的頻率為8.2MHz,可變分頻器的分頻為1/2。
2.伺服電機(jī)驅(qū)動電路的操作過程
圖2顯示了伺服電機(jī)驅(qū)動電路的操作流程圖。伺服電機(jī)驅(qū)動系統(tǒng)的啟動開關(guān)連接到芯片STK6217的引腳27(見圖5-20),當(dāng)該開關(guān)打開時,引腳21變?yōu)榈碗娖剑?qū)動電路啟動,電機(jī)開始旋轉(zhuǎn)。速度信號發(fā)生器與電動機(jī)同步旋轉(zhuǎn),然后輸出與電動機(jī)速度成比例的頻率信號,該信號從引腳10傳輸?shù)芥i相環(huán)控制電路,并與鎖相環(huán)控制的參考信號進(jìn)行比較。在比較之后,它產(chǎn)生速度誤差信號,即頻率誤差(FO),并且同時產(chǎn)生相位誤差信號(PO),其由控制電路合成為誤差信號。信號轉(zhuǎn)換如下。通過pwM轉(zhuǎn)換電路旋轉(zhuǎn)用于驅(qū)動DC電動機(jī)的電壓電動機(jī),當(dāng)電動機(jī)旋轉(zhuǎn)至接近標(biāo)準(zhǔn)速度時,減小了誤差信號。整個系統(tǒng)構(gòu)成一個自動控制回路,控制的結(jié)果是使電動機(jī)速度處于所需范圍內(nèi)。
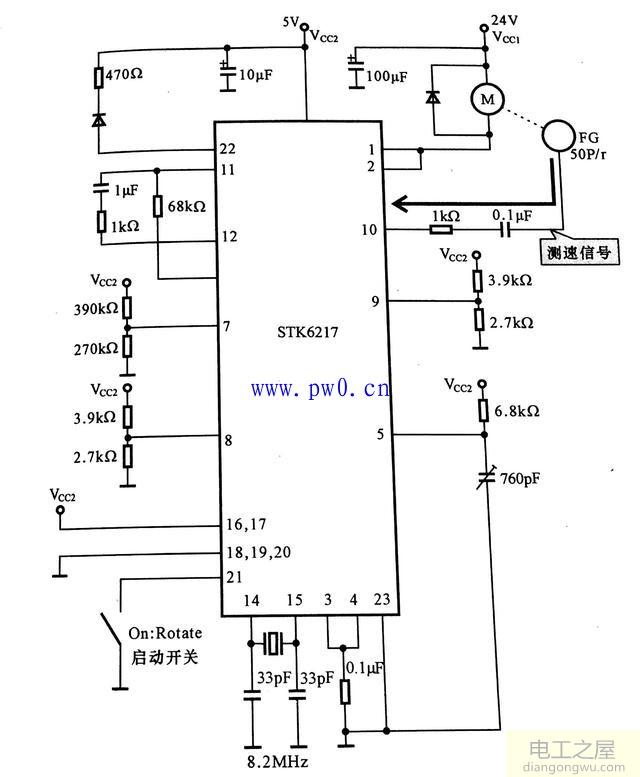
圖1
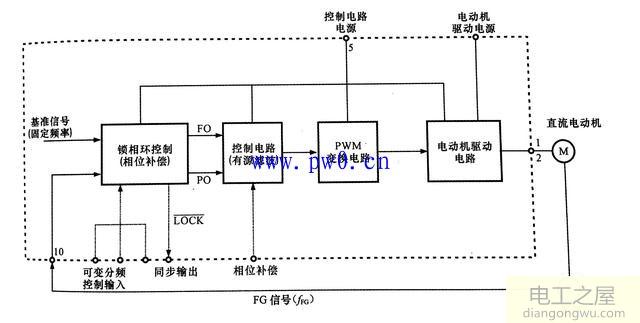
圖2
公司地址 : 上海市嘉定區(qū)寶安公路2999弄
公司郵箱 : 187-1797-6220@163.com
公司電話 :?021-6992-5088
